ElasticSearch 08:内核原理
倒排索引
如何使文本被搜索到是搜索引擎很重要的一部分,倒排索引是很适合搜索的。
因为它的结构:
- 包含这个关键词的document list
- 包含这个关键词的所有document的数量:IDFinverse document frequency.
- 这个关键词在每个document中出现的次数:TFterm frequency.
- 这个关键词在这个document中的次序
- 每个document的长度:length norm
- 包含这个关键词的所有document的平均长度
1 | Term | Doc 1 | Doc 2 | Doc 3 | ... |
倒排索引是不可变的,它的好处如下:
- 不需要锁,提升并发能力,避免锁的问题
- 数据不变,一直保存在os cache中,只要cache内存足够
- filter cache一直驻留在内存,因为数据不变
- 可以压缩,节省cpu和io开销
当然,一个不变的索引也有不好的地方。主要事实是它是不可变的! 你不能修改它。如果你需要让一个新的文档 可被搜索,你需要重建整个索引。这要么对一个索引所能包含的数据量造成了很大的限制,要么对索引可被更新的频率造成了很大的限制。
文档写入原理
文档在写入的时候,ES的流程如下:
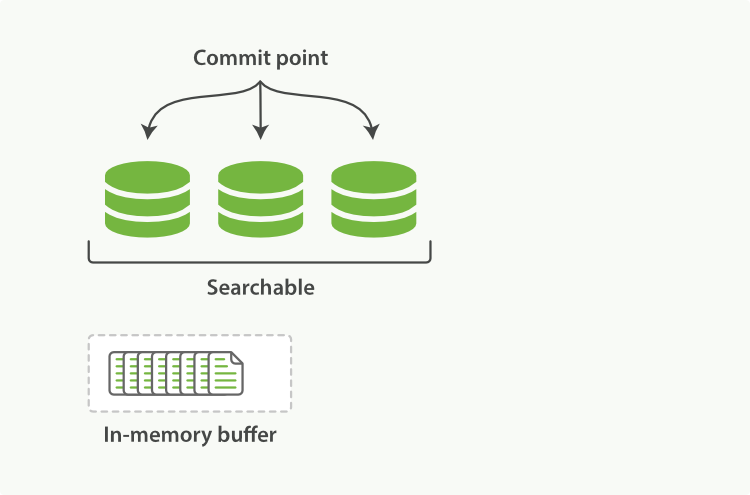
- 新文档写入buffer
- commit point
- buffer中的数据写入新的index segment
- 等待在os cache中的index segment被fsync强制刷到磁盘上
- 新的index sgement被打开,供search使用
- buffer被清空
删除和更新
每次commit point时,会有一个.del文件,标记了哪些segment中的哪些document被标记为deleted了。
搜索的时候,会依次查询所有的segment,从旧的到新的,比如被修改过的document,在旧的segment中,会标记为deleted,在新的segment中会有其新的数据。
优化写入流程
现有流程的问题,每次都必须等待fsync将segment刷入磁盘,才能将segment打开供search使用,这样的话从一个document写入,到它可以被搜索,可能会超过1分钟!这就不是近实时的搜索了!主要瓶颈在于fsync实际发生磁盘IO写数据进磁盘,是很耗时的。
写入流程被改进如下:
- 数据写入buffer
- 每隔一定时间,buffer中的数据被写入segment文件,但是先写入os cache
- 只要segment写入os cache,那就直接打开供search使用,不立即执行commit
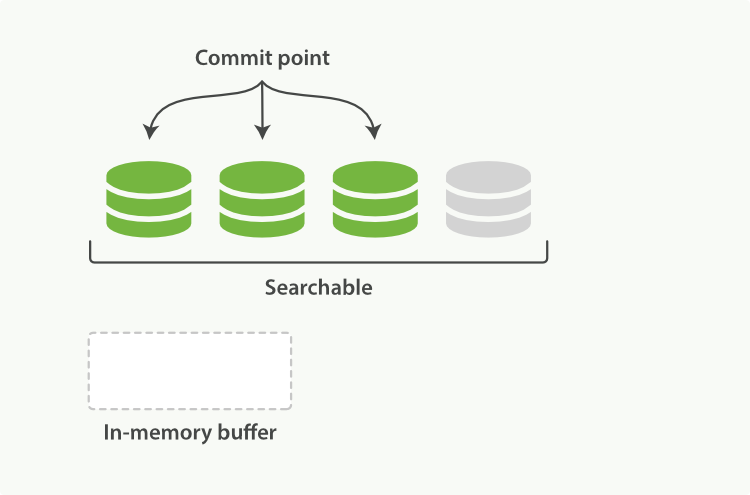
数据写入os cache,并被打开供搜索的过程,叫做refresh,默认是每隔1秒refresh一次。也就是说,每隔一秒就会将buffer中的数据写入一个新的index segment file,先写入os cache中。所以es是近实时的,数据写入到可以被搜索,默认是1秒。
POST /my_index/_refresh,可以手动refresh,一般不需要手动执行,没必要这样,让es自己搞就可以了。
比如说,我们现在的时效性要求比较低,只要求一条数据写入es,一分钟以后才让我们搜索到就可以了,那么就可以调整refresh interval。如果写的并发量和数据量比较大的话,refresh设置长一点可以优化写入速度,因为频繁的写入index segment file会比较占用资源。
1 | PUT /my_index |
可靠存储实现
再次优化的写入流程
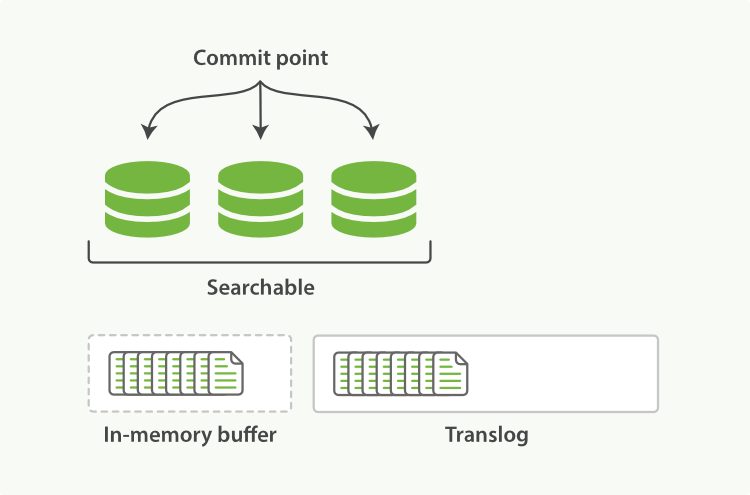
- 数据写入buffer缓冲和translog日志文件
- 每隔一秒钟,buffer中的数据被写入新的segment file,并进入os cache,此时segment被打开并供search使用
- buffer被清空
- 重复1~3,新的segment不断添加,buffer不断被清空,而translog中的数据不断累加
- 当translog长度达到一定程度的时候,commit操作发生
- buffer中的所有数据写入一个新的segment,并写入os cache,打开供使用
- buffer被清空
- 一个commit ponit被写入磁盘,标明了所有的index segment
- filesystem cache中的所有index segment file缓存数据,被fsync强行刷到磁盘上
- 现有的translog被清空,创建一个新的translog
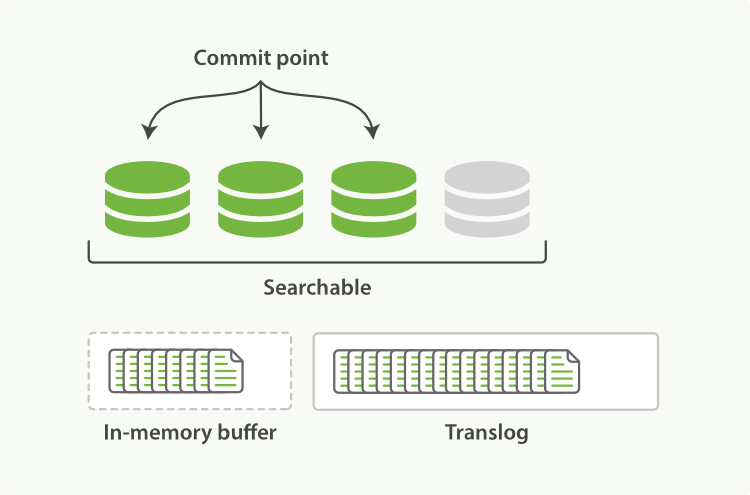
新的文档被添加到内存缓冲区并且被追加到了事务日志
刷新(refresh)完成后, 缓存被清空但是事务日志不会
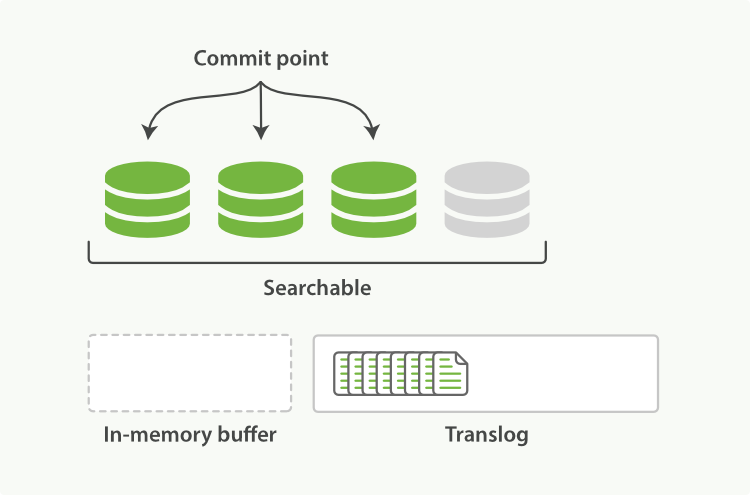
事务日志不断积累文档
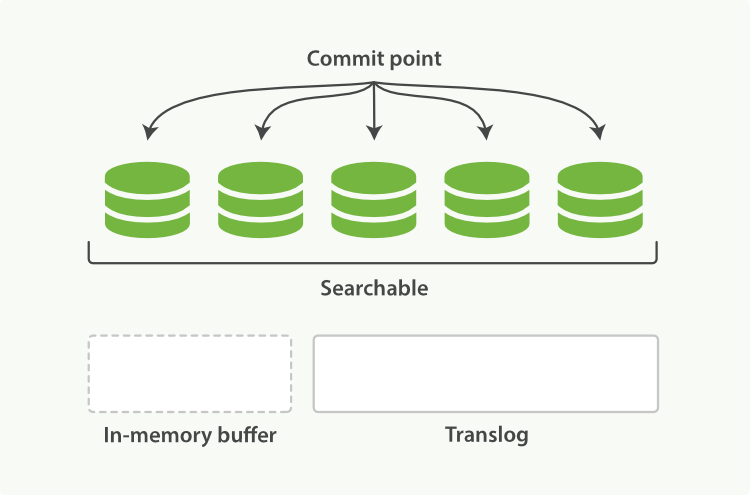
在刷新(flush)之后,段被全量提交,并且事务日志被清空
数据恢复
OS cache中积累了不少数据,这个时候如果机器宕机了,虽然os cache的数据丢失了,但是translog的数据是存在的,可以基于translog和commit point进行数据恢复。
fsync+清空translog,就是flush,默认每隔30分钟flush一次,或者当translog过大的时候,也会flush。
POST /my_index/_flush,一般来说别手动flush,让它自动执行就可以了。
translog
translog本身,每隔5秒被fsync一次到磁盘上。在一次增删改操作之后,当fsync在primary shard和replica shard都成功之后,那次增删改操作才会成功。
但是这种在一次增删改时强行fsync translog可能会导致部分操作比较耗时,也可以允许部分数据丢失,设置异步fsync translog。
1 | PUT /my_index/_settings |
如果你不确定这个行为的后果,最好是使用默认的参数( “index.translog.durability”: “request” )来避免数据丢失。
段合并
前面说了,refresh操作默认是每秒一次,每秒生成一个新的segment file,这样文件太多了,而且每次search都要搜索所有的segment,很耗时。
ES默认会在后台执行segment merge操作,在merge的时候,被标记为deleted的document也会被彻底物理删除。
每次merge操作的执行流程:
- 选择一些有相似大小的segment,merge成一个大的segment
- 将新的segment flush到磁盘上去
- 写一个新的commit point,包括了新的segment,并且排除旧的那些segment
- 将新的segment打开供搜索
- 将旧的segment删除
两个提交了的段和一个未提交的段正在被合并到一个更大的段
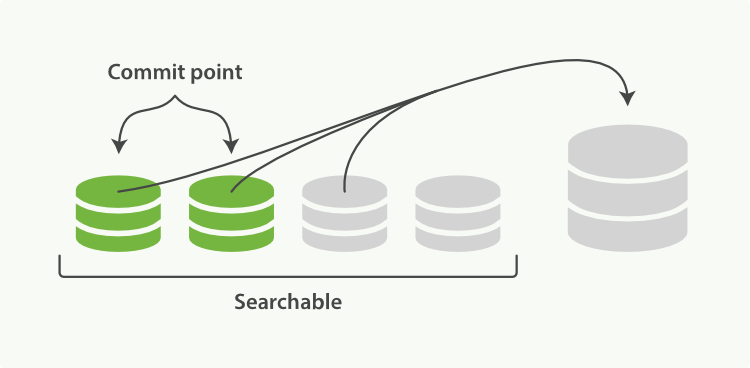
一旦合并结束,老的段被删除

optimize API
optimize API大可看做是 强制合并 API 。它会将一个分片强制合并到 max_num_segments 参数指定大小的段数目。 这样做的意图是减少段的数量(通常减少到一个),来提升搜索性能。
POST /my_index/_optimize?max_num_segments=1,尽量不要手动执行,让它自动默认执行就可以了。
总结
本文系统讲解了相关技术要点。通过学习掌握核心概念和实践方法,提升技术能力。
关键要点
- 理解核心技术原理
- 掌握实际应用方法
- 学习最佳实践和注意事项
实践建议
- 结合实际项目练习
- 深入研究官方文档
- 持续学习和实践